Acoustic Pipe Locating – A Future Trend for Challenging Situations?

No matter the technology used to locate buried pipes and cables today, there is no single tool that can do it all. Just as a carpenter’s tool box consists of application-based tools like the hammer, chisel and screwdriver, the role of the utility locator also calls for more than one tool to be effective in the field. To fully understand what sets these different tools apart, and when a specific tool should be selected over another, one must first understand the applications and limitations of currently available locating Acoustic Pipe Locating equipment.
Today, the most commonly used methods to locate buried infrastructure are electro-magnetic (EM), ground penetrating radar (GPR), and acoustic locators. This article will highlight the technical limitations of each technology and in the process, show what sets the Sensit Ultra-Trac Acoustic Pipe Locator apart as a truly essential tool for the locator’s toolbox.
Electromagnetic Utility Locators
In 1931, Gerhard Fischer invented the first handheld utility locator for commercial use, to primarily locate buried metallic pipes and cables. Electromagnetic (EM) pipe and cable locators use electricity to create a magnetic field to trace the path of buried metallic pipes and cables. EM locators can only detect metallic pipes, cables and wire. They are commonly called conventional locators, due to their widespread use. Conventional EM utility locators have two main parts: the transmitter and the receiver. The transmitter functions as a miniature power plant and is used to transmit alternating current to energize a metallic pipe, cable or wire. The byproduct of alternating current flowing on a metallic conductor is a magnetic field that may be detected by the receiver.
Limitations of EM Locators
– Other metal present near the target line can cause distortion, causing error in the reading. This could be anything metallic, such as a parallel utility line, a metal building or a vehicle.
– EM locating equipment can only be used to locate metallic utilities. It cannot be used to find non-metallic lines unless a tracer wire is present (for plastic or concrete-asbestos pipe, for example) and is metallically continuous.
– EM locating equipment cannot tell what type of utility is being located. The operator must verify the utility type by either potholing or tracing the utility line structure to structure.
Ground Penetrating Radar 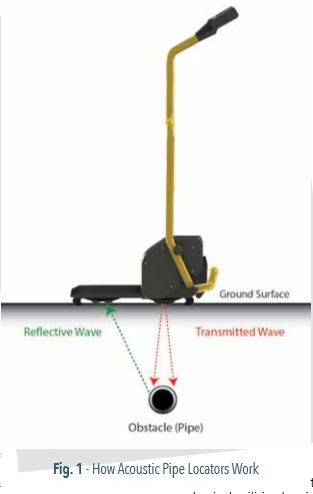
The first large-scale application for Radio Detection and Ranging (RADAR) was used during World War II by the British and American military, to detect electromagnetic pulses reflected by aircraft.
Ground Penetrating Radar (GPR) was first used to determine the depth of a glacier in Austria in 1929. Today, despite its common limitations due to soil conditions, modern use of GPR to locate buried utilities has increased in popularity, due to the ability to find both metallic and non-metallic lines.
Environmental Factors
The dielectric constant of the media or substrate being scanned determines the amount of signal that is absorbed by the substrate through attenuation. Because soil type determines this factor, soil conditions must be optimal for GPR to work. Soil moisture content greatly affects the GPR signal. In general, dry soil is better than wet. Also known as permittivity, the dielectric constant is frequency dependent for GPR. The higher the frequency, the better the resolution with shallower depth penetration. Conversely, the lower the frequency, the better the depth penetration with lower resolution. The size and material of the target line will also impact the ability to be seen using GPR.
GPR Limitations
– Soil type plays a major role in the ability to find pipes and cables using GPR.
– The greater the depth, the greater the target utility size needs to be. Smaller pipes and cables may not be found using GPR.
– Certain types of pipe materials simply cannot be seen by GPR in any soil type, at any depth.
– GPR cannot tell the type or material of the buried utility line. It must be verified by potholing or by tracing the utility line from structure to structure.
Acoustic Pipe Locator (APL)
Originally invented by the Gas Technology Institute (GTI), SENSIT Technologies acquired the rights for commercialization and production in 2011. Since the first ULTRATRAC® Acoustic Pipe Locator (APL) rolled off SENSIT’s production line, many advancements have been made based on input from end users. The latest advancement is the incorporation of a Windows-based tablet into the unit to improve user friendliness and reduce false readings. The APL can be used to find metallic and non-metallic pipes and conduit, in any soil type, to depths of 15-30 feet. The APL provides an alternative and supplemental method of locating buried pipes. The APL transmits and receives acoustic sound waves and then looks for differences in acoustic impedance in the soil caused by pipes, cables, ducts and other buried infrastructure using a process known as impedance mismatch. The APL is able to locate buried utilities, regardless of material type, broken tracer wire and soil conditions.
The chassis, or foot of the unit, houses the battery, electronic components and send-and-receive sensors. Located near the front of the chassis, the actuator sends a series of sound waves, or ‘pings’ into the ground. To the rear of the chassis, dual matched accelerometers receive the sound waves once they have been reflected from a buried pipe, cable, or duct. How APL Works (See Fig. 1) With the push of the APL’s scan button, sound pressure waves are sent into the ground. A series of pings are delivered at a single location, known as a slice.
A series of slices is known as a scan. A scan must consist of at least five slices, to allow internal software to calculate the location of a buried utility line. A minimum of three rows, spaced 5-25 feet apart, must be used to conduct a utility survey grid. A pattern will emerge in the survey, identifying the possible location of a buried pipe. The tablet displays this information to the operator on-thefly and is used to mark locations on the ground. Survey image data can also be stored for use as a client deliverable, emailed to a supervisor for verification, or stored for record keeping purposes. 
APL Limitations
– As with GPR and EM, the operator should start a locate at a known facility location or surface structure, to verify readings on the APL display.
– As with EM and GPR, the APL cannot tell what type of facility is being located. The operator must verify the utility type by potholing or tracing the utility line structure to structure.
Conclusion
Given their inherent limitations, a toolbox consisting solely of EM and GPR locating equipment simply cannot find everything on their own, unless the target utility is metallic, or has an unbroken tracer wire for EM, or soil conditions are optimal for the use of GPR. As the USGS soil map shows, in the contiguous United States, optimal soil conditions for effective use of GPR may not be present in all areas. Pairing EM equipment with the APL enables the end user to find both metallic and non-metallic utilities, in a broad range of soil types.
The Sensit APL (Fig. 4) provides the operator with an essential tool to locate metallic and non-metallic pipes, cables and ducts, regardless of broken tracer wire and soil type. Its ease of operation, coupled with the ability to display and store scan data, makes the APL an excellent choice for anyone trying to find buried pipes, cables and ducts. Utility locators, engineers, surveyors, energy companies and municipalities alike, are currently deploying acoustic locating technology worldwide with the Sensit APL.
Re-printed with permission
Zeciri, Adam. Acoustic Pipe Locating – A Future Trend for Challenging Situations?
http://www.gasleaksensors.com/press/SENSIT-American-Locator-4-2017.pdf